

Sensor fusion smoothing migliora la precisione della traiettoria in post-processing eliminando salti e riducendo l’incertezza di posizionamento.
Sensor fusion smoothing: che cos’è?
La sensor fusion è un termine generale che indica l’insieme degli approcci che utilizzano i dati provenienti da più sensori per stimare lo stato di un sistema. È ampiamente utilizzata nel posizionamento e nella navigazione, così come in tutti quei campi che richiedono una stima precisa e affidabile della posizione, ad esempio la robotica o l’agricoltura di precisione.
Si consideri, ad esempio, un robot autonomo o un veicolo a guida autonoma: per garantirne un comportamento sicuro è necessario disporre della stima più affidabile possibile della sua posizione.
In genere, sistemi di questo tipo dispongono di più di una sorgente di informazione per il posizionamento. Un robot mobile che opera all’aperto, per esempio, può essere equipaggiato con un ricevitore GNSS, un’IMU (sensore inerziale), un magnetometro, encoder sulle ruote, un sistema LIDAR e così via. Tutti questi sensori contribuiscono al posizionamento, garantendone la continuità e fornendo la migliore soluzione possibile in condizioni operative diverse.
Il punto fondamentale è che nessuno dei dispositivi menzionati è perfetto: ciascuno è soggetto a differenti tipologie di errore, e l’uso combinato di più sensori è la chiave per ottenere una stima di posizione robusta e affidabile.
Esistono numerosi approcci alla sensor fusion; tra i più diffusi si possono citare l’ottimizzazione su grafo e il filtraggio di Kalman. Il filtro di Kalman classico è ampiamente utilizzato per sistemi dinamici lineari, mentre per sistemi non lineari sono state sviluppate varianti più avanzate, come il filtro di Kalman esteso (EKF) e il filtro di Kalman unscented (UKF).
Salti della soluzione nella fusione di dati multi-frequenza
Gli algoritmi di sensor fusion possono essere eseguiti sia in tempo reale sia in post-processing, con caratteristiche e applicazioni differenti. Il posizionamento in tempo reale è necessario ogni volta che la stima di posizione deve essere disponibile immediatamente per la navigazione e per garantire la sicurezza, come accade nella maggior parte delle applicazioni legate ai trasporti. Il post-processing, invece, è fondamentale quando la traiettoria deve essere ulteriormente raffinata. Questo avviene spesso in ambiti come il rilievo e la fotogrammetria, dove i dati acquisiti devono essere accuratamente georeferenziati.
La sensor fusion in tempo reale viene tipicamente eseguita a bordo del dispositivo, mentre il post-processing può essere effettuato successivamente su una piattaforma separata, utilizzando le registrazioni dei sensori raccolte dal veicolo o dal sistema.
Quando un algoritmo come il filtro di Kalman opera in tempo reale, a ogni istante utilizza esclusivamente i dati disponibili in quel momento. Poiché i diversi sensori forniscono dati a frequenze differenti, non tutte le misure sono disponibili a ogni passo dell’algoritmo. Un caso tipico è la fusione di dati GNSS e IMU: mentre l’IMU fornisce misure ad alta frequenza (ad esempio 100 Hz o superiore), il GNSS opera spesso a 1 Hz, arrivando al massimo a 10–20 Hz nelle applicazioni più critiche.
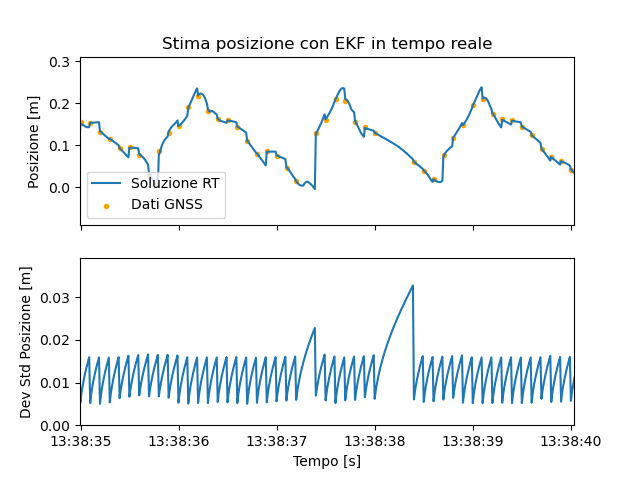
Di conseguenza, ogni aggiornamento GNSS può introdurre una correzione significativa nella stima della posizione, causando inevitabilmente un salto della soluzione in tempo reale, come illustrato in Fig. 1. il grafico della deviazione standard della posizione, che rappresenta l’errore stimato internamente dall’algoritmo. In assenza di misure GNSS, l’incertezza cresce a causa dell’accumulo degli errori inerziali; quando arriva una correzione GNSS, l’incertezza si riduce nuovamente. Durante interruzioni prolungate del segnale GNSS, l’incertezza aumenta rapidamente.
Questo comportamento è accettabile per evitare collisioni e garantire la navigazione in tempo reale. Tuttavia, se il robot è dotato di una camera o di un LIDAR i cui dati devono essere utilizzati per applicazioni di fotogrammetria o ricostruzione 3D, diventa essenziale disporre di una traiettoria il più possibile liscia e precisa.
Smoothing della traiettoria: una soluzione in post-processing
Poiché la ricostruzione 3D su larga scala viene comunque eseguita in post-processing, non vi sono particolari limitazioni nel raffinare ulteriormente anche la stima della traiettoria dopo l’acquisizione dei dati. Quando un algoritmo opera in tempo reale, infatti, può utilizzare esclusivamente le informazioni passate: è chiaramente impossibile conoscere le misure future. Al contrario, quando l’intera sequenza di dati è disponibile, la soluzione può essere “smussata” (smoothed) utilizzando sia le informazioni passate sia quelle future.
L’intuizione alla base di questo processo è simile all’esecuzione dello stesso algoritmo sia in avanti sia all’indietro nel tempo, combinando poi le stime ottenute pesandole in base alle rispettive covarianze. L’algoritmo reale è in effetti più complesso, specialmente per sistemi non lineari come quelli di navigazione inerziale. Una tecnica comunemente utilizzata per il post-processing dei filtri di Kalman è lo smoothing di Rauch–Tung–Striebel (RTS), dal nome degli autori che lo hanno sviluppato.
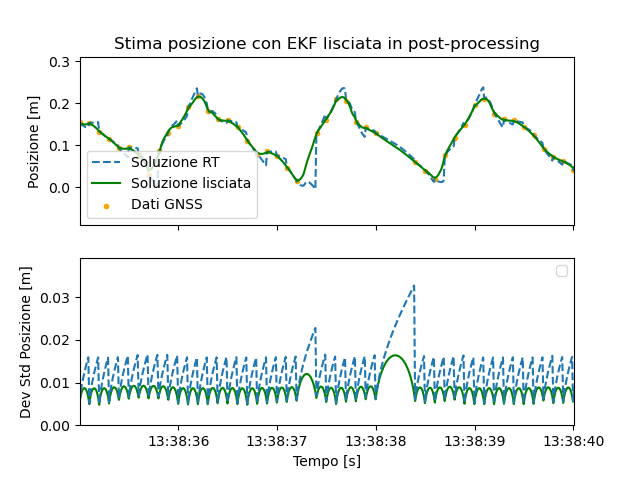
L’aspetto fondamentale di questo approccio è che, durante l’elaborazione con il filtro di Kalman, devono essere salvati tutti gli stati e le matrici di covarianza (sia predette sia filtrate). Questo comporta un certo costo in termini di memoria, ampiamente compensato dalla qualità della soluzione ottenuta. In Fig. 2 è mostrata la stessa serie temporale dopo l’applicazione dello smoothing RTS. Si può notare come la soluzione smussata attraversi in modo continuo i punti GNSS, eliminando completamente i salti. Inoltre, osservando il grafico della deviazione standard, si nota che, invece di crescere monotonicamente fino alla successiva correzione, l’incertezza assume un andamento simmetrico tra due aggiornamenti GNSS, con un massimo a metà intervallo, comportamento che risulta intuitivamente corretto.
Sensor fusion smoothing: è possibile ottenere questo risultato in tempo reale?
Questa è una domanda complessa. Molti utenti preferirebbero disporre di una soluzione liscia direttamente in tempo reale, ma ciò introduce notevoli difficoltà dal punto di vista computazionale. Gli algoritmi di smoothing classici richiedono infatti un’elaborazione all’indietro a partire da un istante finale, il che rende impossibile una vera implementazione in tempo reale.
In linea di principio, si potrebbe considerare l’istante corrente come un punto finale temporaneo ed eseguire uno smoothing all’indietro a ogni iterazione. Tuttavia, ciò richiederebbe di rielaborare un numero crescente di stati passati, rendendo rapidamente l’approccio computazionalmente insostenibile.
Un compromesso pratico consiste nell’applicare il sensor fusion smoothing su una finestra temporale finita, mantenendo un numero fisso di epoche passate ed eseguendo l’elaborazione all’indietro solo all’interno di questa finestra. Con risorse computazionali sufficienti, questo tipo di fixed-lag smoothing può essere implementato in tempo reale e rappresenta spesso un buon compromesso tra latenza, qualità della soluzione e costo computazionale.
(Fonte: Gter)

















{kind=link}